

Tay gắp vải- tay gắp găng tay- tay gắp thảm- tay gắp tấm Poam
Giá:
Liên hệ
-

GIAO HÀNG
Giao hàng tận nơi trong nội thành Biên Hòa.
Các tỉnh khách có hỗ trợ COD. -

SẢN PHẨM
Cam kết chính hãng 100%
-

HỖ TRỢ
Hotline: 0908.043.781
Chia sẻ
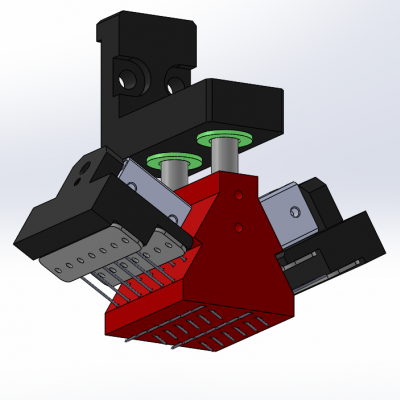
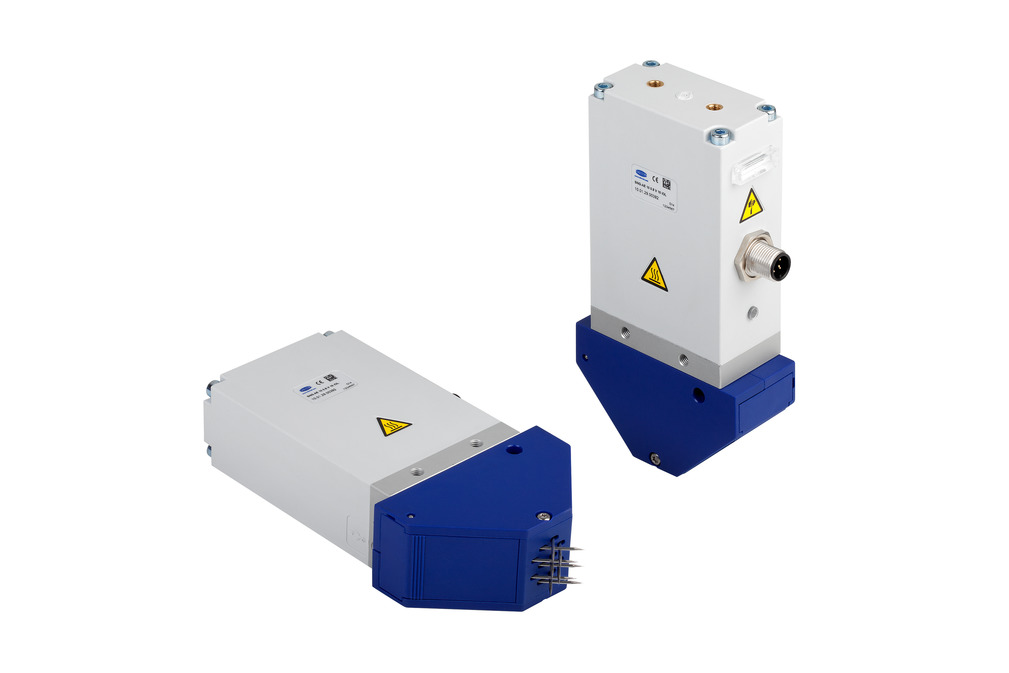
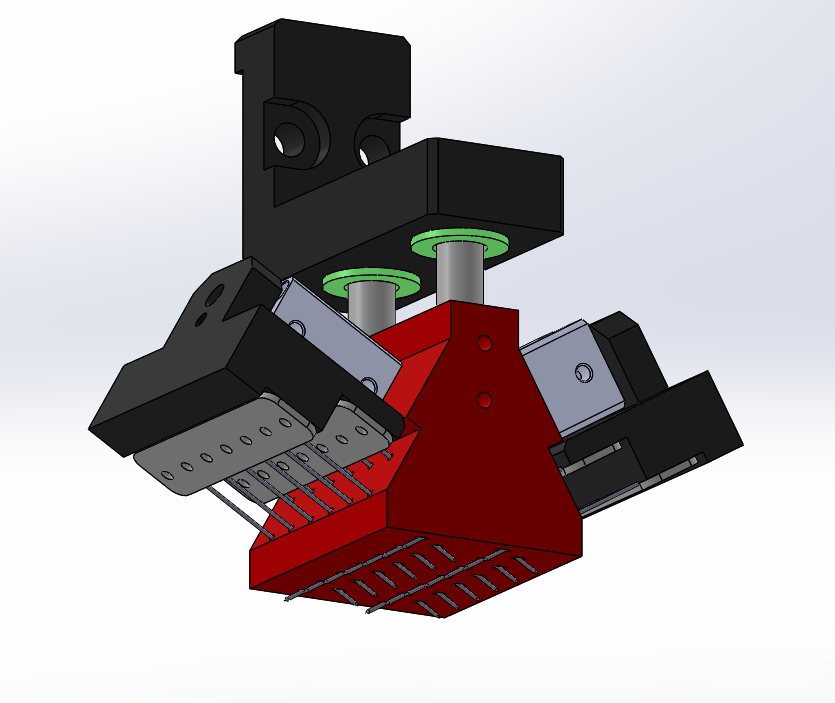
Bộ kẹp dạng kim là một loại công cụ gắp robot dùng để nắm giữ các vật liệu mềm, linh hoạt hoặc có lỗ thoáng, thường được sử dụng trong các ngành công nghiệp dệt may, ô tô, và điện tử. Thay vì sử dụng phương pháp kẹp truyền thống như hút chân không hoặc kẹp cơ học, bộ kẹp dạng kim sử dụng những kim mảnh để xuyên vào vật liệu, cho phép robot nhấc, di chuyển và đặt vật thể một cách an toàn.
Các đặc điểm chính của bộ kẹp dạng kim:
-
Kim để xuyên qua vật liệu: Bộ kẹp sử dụng nhiều kim mảnh để xuyên qua bề mặt của vật liệu, giúp nắm giữ vật thể một cách chắc chắn. Điều này đặc biệt hữu ích cho các vật liệu có lỗ thoáng hoặc sợi như vải, bọt xốp hoặc lưới.
-
Hoạt động bằng khí nén hoặc điện: Bộ kẹp dạng kim thường sử dụng xi lanh khí nén hoặc bộ truyền động điện để đẩy kim ra và thu lại, cho phép kim bám vào và thả ra vật liệu.
-
Điều chỉnh độ sâu xuyên kim: Độ sâu mà kim xuyên vào có thể điều chỉnh dựa trên độ dày và độ cứng của vật liệu được xử lý. Điều này giúp linh hoạt trong việc xử lý các loại vật liệu khác nhau.
-
Lý tưởng cho vật liệu mỏng manh hoặc khó nắm bắt: Bộ kẹp dạng kim hiệu quả khi các phương pháp kẹp truyền thống (như hút chân không hoặc kẹp cơ học) không hoạt động tốt, đặc biệt đối với các vật liệu quá mềm, có lỗ thoáng hoặc linh hoạt.
Ứng dụng của bộ kẹp dạng kim:
- Ngành dệt may: Nắm giữ và di chuyển vải hoặc vải vóc quá mềm đối với các bộ kẹp hút chân không hoặc kẹp cơ học.
- Xử lý bọt xốp: Sử dụng để xuyên vào các tấm bọt xốp trong các quy trình đóng gói hoặc sản xuất.
- Vật liệu tổng hợp: Xử lý các vật liệu có lỗ thoáng hoặc cấu trúc xốp.
- Điện tử: Trong một số quy trình lắp ráp đòi hỏi xử lý chính xác và nhẹ nhàng các thành phần mềm.
Ưu điểm:
- Giữ chắc không trượt: Cung cấp độ bám mạnh và an toàn, đặc biệt với các vật liệu linh hoạt.
- Tính linh hoạt: Có thể tùy chỉnh cho các ứng dụng cụ thể, chẳng hạn như xử lý vải hoặc các bề mặt có lỗ thoáng.
- Thiết kế nhỏ gọn: Bộ kẹp dạng kim thường có kích thước nhỏ hơn so với các hệ thống kẹp khác như kẹp hút chân không hoặc kẹp cơ học.

